平台
Ubuntu 16.04
ROS Kinetic Kame
建图算法概述
在机器人领域中,比较常见的研究问题包括:建图Mapping、定位Localization和路径规划Path Planning。而同时定位与地图构建Simultaneous Localization and Mapping属于位于定位和建图的交集部分。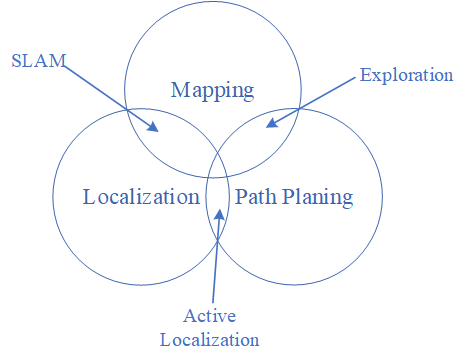
建图算法分类
SLAM的具体含义为:搭建特定传感器的主体,在没有环境先验信息的情况下,与运动过程中建立环境的模型,同时估计自己的运动。由此可见,SLAM主要解决两个问题:1.定位:估计传感器自身的位置;2.地图构建:建立周围环境的模型。目前SLAM按照传感器类型可以分为基于视觉传感器的视觉SLAM和基于激光雷达传感器的激光SLAM。由于视觉传感器很受光照的影响,目前主流的建图算法还是基于激光雷达传感器。但不管是哪种传感器,其基本框架大致相同: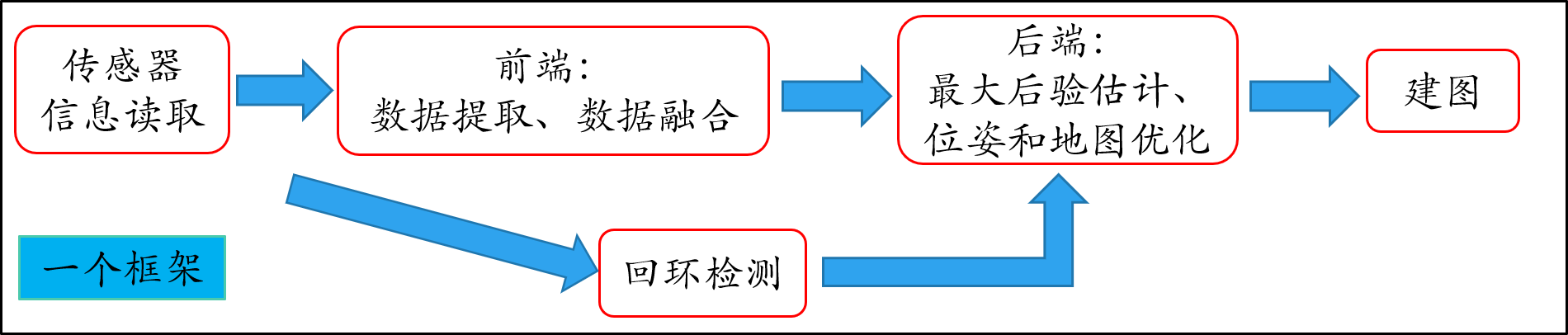
由图可见,在传感器信息读取、前端、回环检测和建图这几个模块,目前主流的建图算法都大致相同,而针对后端模块的处理大致可以分为两类:一类是基于滤波器的算法,例如高斯滤波器、直方图滤波器和粒子滤波器等,其基本原理为:通过估计后验概率,递推贝叶斯状态估计来求解机器人路径和地图。另一类为基于图优化的算法,例如非线性最小二乘法、随机梯度下降法等,其基本原理为:将数学模型转化为因子图的方式来求解,通过将位姿描述成节点和将约束关系描述成边以使问题可视化。本博客所探讨的Gmapping建图算法属于基于滤波器的粒子滤波器算法。另一种比较主流的建图算法Cartographer属于基于图优化的算法。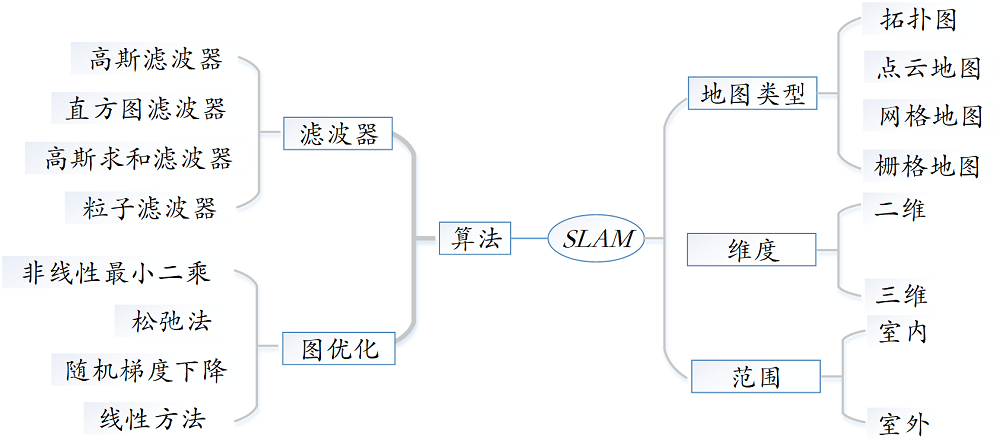
地图
由上图可见,SLAM中的地图有很多种,一般2D的建图算法生成的均为栅格地图。
栅格地图很好理解,就是一张普通的灰度图像,通常为pgm格式。这张图像上的黑色像素表示障碍物,白色像素表示可行区域,灰色是未探索的区域。
在SLAM建图的过程中,你可以在RViz里看到一张地图被逐渐建立起来的过程,类似于一块块拼图被拼接成一张完整的地图。这张地图对于我们定位、路径规划都是不可缺少的信息。事实上,地图在ROS中是以Topic的形式维护和呈现的,这个Topic名称就叫做/map,它的消息类型是nav_msgs/OccupancyGrid。
由于/map中实际上存储的是一张图片,为了减少不必要的开销,这个Topic往往采用锁存(latched)的方式来发布。什么是锁存?其实就是:地图如果没有更新,就维持着上次发布的内容不变,此时如果有新的订阅者订阅消息,这时只会收到一个/map的消息,也就是上次发布的消息;只有地图更新了(比如SLAM又建出来新的地图),这时/map才会发布新的内容。锁存器的作用就是,将发布者最后一次发布的消息保存下来,然后把它自动发送给后来的订阅者。这种方式非常适合变动较慢、相对固定的数据(例如地图),然后只发布一次,相比于同样的消息不定的发布,锁存的方式既可以减少通信中对带宽的占用,也可以减少消息资源维护的开销。
注:参考中国大学MOOC—-《机器人操作系统入门》课程讲义,下载地址。
Gmapping算法原理理解
Gmapping算法概述
论文下载地址
Gmapping是基于滤波SLAM框架的常用开源SLAM算法。其基本原理基于RBpf粒子滤波算法,即将定位和建图过程分离,先进行定位再进行建图。粒子滤波算法是早期的一种建图算法,其基本原理为机器人不断地通过运动、观测的方式,获取周围环境信息,逐步降低自身位置的不确定度,最终得到准确的定位结果。用上一时刻的地图和运动模型预测当前时刻的位姿,然后计算权重,重采样,更新粒子的地图,如此往复。
Gmapping可以实时构建室内地图,在构建小场景地图所需的计算量较小且精度较高。相比Cartographer在构建小场景地图时,Gmapping不需要太多的粒子并且没有回环检测因此计算量小于Cartographer而精度并没有差太多。Gmapping有效利用了车轮里程计信息,这也是Gmapping对激光雷达频率要求低的原因:里程计可以提供机器人的位姿先验。
随着场景增大所需的粒子增加,因为每个粒子都携带一幅地图,因此在构建大地图时所需内存和计算量都会增加。因此不适合构建大场景地图。并且没有回环检测,因此在回环闭合时可能会造成地图错位,虽然增加粒子数目可以使地图闭合但是以增加计算量和内存为代价。所以不能像Cartographer那样构建大的地图。Gmapping和Cartographer一个是基于滤波框架SLAM另一个是基于优化框架的SLAM,两种算法都涉及到时间复杂度和空间复杂度的权衡。Gmapping牺牲空间复杂度保证时间复杂度,这就造成Gmapping不适合构建大场景地图。
RBpf粒子滤波算法——先定位再建图
SLAM需要解决的是定位与建图问题,而定位需要建图,建图也需要先定位,如何平衡这两者关系就是解决SLAM问题的关键。为此,基于RBpf(Rao-Blackwellized)粒子滤波算法提供了一个思路:先定位再建图,具体如下:
其中,$x{1:t}$表示1到t时刻的位姿,m表示地图,$z{1:t}$表示观测值,这里就是激光雷达的值,$u_{1:t-1}$表示运动值,这里就是里程计(IMU)的值。
一般的,SLAM的数学模型可以用上式表示。第一部分表示已知运动值和观测值求出地图和机器人位姿,第二部分表示已知运动值和观测值求出机器人位姿,第三部分为已知位姿和观测值求出地图信息。根据概率论的知识,上式是一个条件联合概率分布,即通过观测值和里程计的值得出位姿和地图,但如果把这2个值都作为条件去求概率会十分困难,而由概率论的知识可知,联合概率可以转换成条件概率,即$P\left ( x,y \right )=P\left ( y|x \right )\cdot p\left ( x \right )$。因此可以将上式转换为先根据观测值和运动值求出位姿,然后根据观测值和位姿求出地图。这就大大降低了求解的难度。
这看起好像很好,但基于粒子滤波器的算法会存在一些问题:1.精确的地图需要更多的粒子,但同时也会增加计算量和内存消耗;2.频繁执行重采样会造成粒子退化(正确的粒子被丢弃,粒子多样性减小)。
因此,Gmapping算法针对这两个问题,分别进行了改进:改进的提议分布和选择性重采样。
附:SIR(Samping Importance Resampling)粒子滤波算法流程
- 预测阶段:粒子滤波首先根据状态转移函数预测生成大量的采样,这些采样就称之为粒子,利用这些粒子的加权和来逼近后验概率密度。
- 校正阶段:随着观测值的依次到达,为每个粒子计算相应的重要性权值。这个权值代表了预测的位姿取第个粒子时获得观测的概率。如此这般下来,对所有粒子都进行这样一个评价,越有可能获得观测的粒子,获得的权重越高。
- 重采样阶段:根据权值的比例重新分布采样粒子。由于近似逼近连续分布的粒子数量有限,因此这个步骤非常重要。下一轮滤波中,再将重采样过后的粒子集输入到状态转移方程中,就能够获得新的预测粒子了。
- 地图估计:对于每个采样的粒子,通过其采样的轨迹与观测计算出相应的地图估计。
SIR算法需要在新的观测值到达时从头评估粒子的权重。当轨迹的长度随着时间的推移而增加时,这个过程的计算复杂度将越来越高。因此Doucet等学者通过式(2)限制重要性概率密度函数来获得递归公式去计算重要性权值。
改进的提议分布
参考博客
Gmapping源代码理解
下载完成后,进入src/slam_gmapping/gmapping/src文件夹,打开main.cpp,可以看到gmapping在ros下面定义的一个节点slam_gmapping,该节点也是上节中rosrun命令下的节点。
mian函数比较简单,只是声明了一个节点和一个SlamGMapping类,并调用了该类下面的startLiveSlam()函数,该函数的声明在该文件夹下的slam_gmapping.cpp文件中。下面则正式进入源代码的分析。
注:在正式进入前,需要有一定的ROS基础,具体可参考我的另一篇博客ROS功能包及其应用,也可以百度其他博客学习。
Gmapping源代码框架
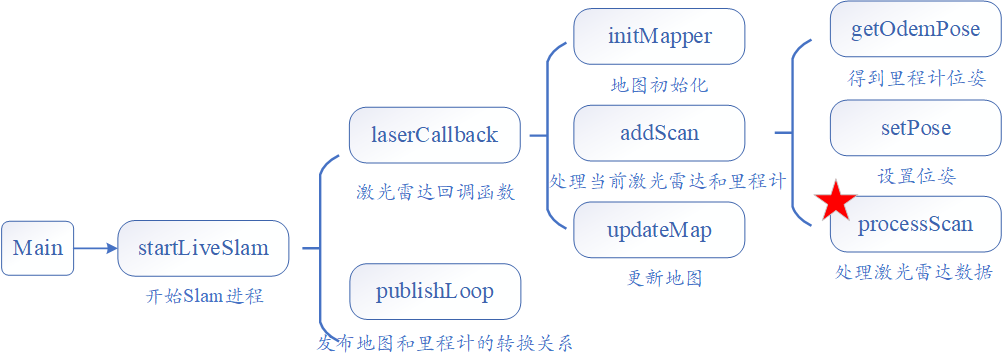
startLiveSlam()
该函数的功能为正式开始Slam进程。其代码如下:1
2
3
4
5
6
7
8
9
10
11
12
13void SlamGMapping::startLiveSlam()
{
entropy_publisher_ = private_nh_.advertise<std_msgs::Float64>("entropy", 1, true);
sst_ = node_.advertise<nav_msgs::OccupancyGrid>("map", 1, true);
sstm_ = node_.advertise<nav_msgs::MapMetaData>("map_metadata", 1, true);
ss_ = node_.advertiseService("dynamic_map", &SlamGMapping::mapCallback, this);
scan_filter_sub_ = new message_filters::Subscriber<sensor_msgs::LaserScan>(node_, "scan", 5);
scan_filter_ = new tf::MessageFilter<sensor_msgs::LaserScan>(*scan_filter_sub_, tf_, odom_frame_, 5);
scan_filter_->registerCallback(boost::bind(&SlamGMapping::laserCallback, this, _1));
transform_thread_ = new boost::thread(boost::bind(&SlamGMapping::publishLoop, this, transform_publish_period_));
}
该函数整体上为ros中的通讯部分,大致可以分为三部分,第一部分为消息的发布,主要有<std_msgs::Float64>:激光雷达数据序号,<nav_msgs::OccupancyGrid> :2D栅格图信息, <nav_msgs::MapMetaData>:栅格图特征信息这3个topic信息(具体可以参考官方文档:nav_msgs)和一个服务器信息:dynamic_map:不断更新的动态地图。
第二部分为消息的订阅,这里都是对激光雷达消息<sensor_msgs::LaserScan>的订阅,其中message_filters表示消息过滤器,类似一个消息缓存,当消息到达消息过滤器的时候,可能并不会立即输出,而是在稍后的时间点里满足一定条件下输出。而tf::MessageFilter可以订阅任何的ROS消息,然后将其缓存,直到这些消息可以转换到目标坐标系,然后进行相应的处理(进入回调函数)。tf::MessageFilter的初始化需要message_filters::Subscriber,tf转换,目标坐标系,等待时间。
第三部分为回调函数和线程的启动,其中处理激光雷达和坐标变换的回调函数为laserCallback(),处理完之后会启动发布转换关系的线程publishLoop()。
总而言之,就是发布地图消息,订阅激光雷达数据,并通过回调函数对其进行坐标转换,并启动线程发布该坐标转换,更新地图。因此比较重要的有2个函数:laserCallback()和publishLoop()。
laserCallback()
1 | void |
该函数输入参数为之前订阅的消息<sensor_msgs::LaserScan>,没有返回值。
该函数为处理激光雷达数据的回调函数,首先当接收到一帧激光雷达数据时,判断是否为第一帧数据,如果是则调用initMapper()初始化地图,否则调用addScan()将其数据插入到当前的地图中,如果到了地图更新的时间,则会调用updateMap()进行地图更新。
initMapper()
该函数为gmapping算法的初始化,该函数在收到的第一帧激光雷达数据的时候会被调用一次,之后就再也不会被调用了。该函数的功能主要就是对gmapping算法中需要的一些参数进行赋值,即:
- 判断激光雷达是否是水平放置的,如果不是则报错。
- 设激光雷达数据的角度是对称的&递增的,为每个激光束分配角度。
- 为
gmapping算法设置各种需要的参数。
这里代码较长,且大部分为判断激光雷达的初始设置,有兴趣可以阅读参考博客[1-2]。
addScan()
1 | bool |
该函数输入参数为之前订阅的消息<sensor_msgs::LaserScan>和自定义的数据类型OrientedPoint,具体定义在openslam_gmapping/include/gmapping/utils/point.h中,表示的是(x,y,$\theta$),即当前点的x,y和偏航角。
首先通过getOdomPose()得到与激光雷达时间戳相对应的机器人里程计的位姿,然后将ROS中的激光雷达数据信息转换为Gmapping算法的数据格式,并调用setPose()设置其位姿,最后通过processScan()函数进行处理。
这里除了getOdomPose()是该.cpp文件中的函数,其余均是底层算法openslam_gmapping中的函数。
reading.setPose(gmap_pose);中的reading是GMapping::RangeReading类的实例化,该类的定义位于openslam_gmapping/include/gmapping/sensor/sensor_range/rangereading.h中。
gsp_->processScan(reading)中的gsp_的声明在slam_gmapping.h中,是GMapping::GridSlamProcessor类的实例化,该类的定义位于openslam_gmapping/include/gmapping/gridfastslam/gridslamprocessor.h。
这里最重要的当然是processScan()这个函数了,这也是整个Gmapping算法最核心的一个函数,这里先暂时跳过该函数,后面再详细介绍。