硬件总图
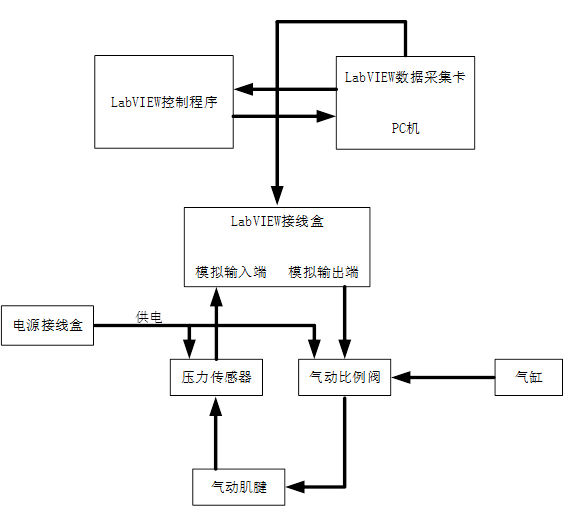
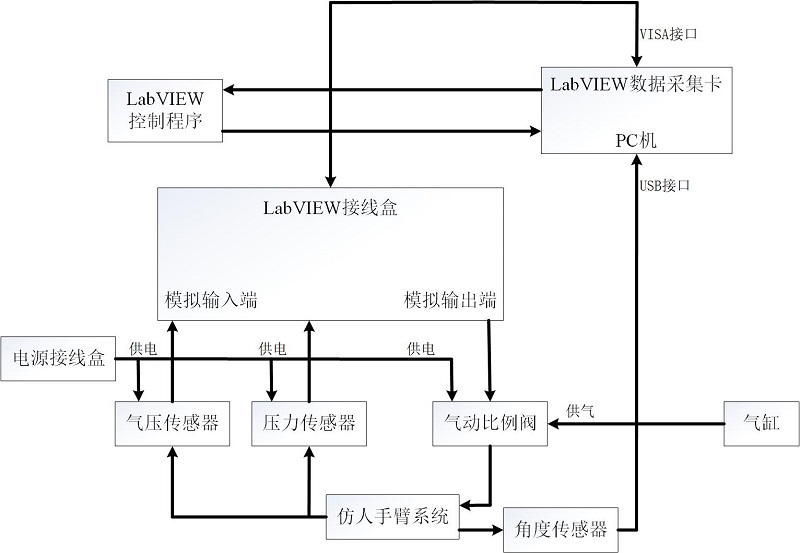
LabVIEW数据采集卡
LabVIEW数据采集卡插到PC机的PCI插槽中。并用连接线与LabVIEW接线盒连接。
LabVIEW接线盒
模拟输入端
模拟输入端和气压传感器相连。接线盒的输入端采用单端接入,即连接AI+和GND。气压传感器的白色接线端为信号线,棕色接线端为正极,蓝色接线端为负极。
连接方式:将AI+(接线盒中的任意一个模拟输入端)与气压传感器的白色接线端相接,GND和下一个待接的GND相接(保证接线盒内的所有的地线都连通即可)。气压传感器的棕色接线端和蓝色接线端分别接入电源接线盒的正极和负极,给气压传感器供电。
注:每个LabVIEW接线盒内要有1根地线与电源接线盒的地线(-V)相接。
模拟输出端
模拟输出端和气动比例阀相连。气动比例阀的白色接线端为信号线,棕色接线端为正极,蓝色接线端为负极。
连接方式:将AO(接线盒中的任意一个模拟输出端)与气动比例阀的白色接线端相接,GND和下一个待接的GND相接(保证接线盒内的所有的地线都连通即可)。气动比例阀的棕色接线端和蓝色接线端分别接入电源接线盒的正极和负极,给气动比例阀供电。
气缸使用
开启:①将抽气开关按下,阀门开关闭合。②接通电源。③打开抽气开关(提上去),气缸开始充气,待气压显示表到达指定气压值时(0.6MPa),按下开关。④打开阀门开关,即可出气。
关闭:①关闭阀门开关,停止出气。②拔掉电源,气缸每隔一段时间自动漏气。